
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 2.1.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2019-04-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Ethan Gao
Authors
- Patrick Mihelich
- James Bowman
cv_bridge
Introduction
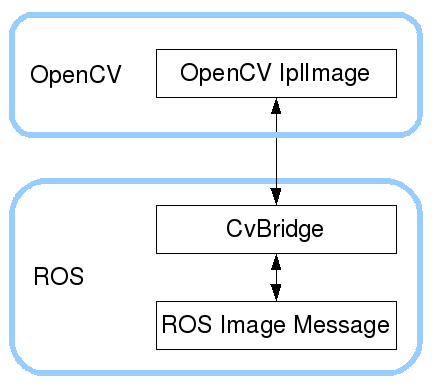
cv_bridge converts between ROS2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ros2 core has already been installed, please refer to ROS2 installation to get started if the ros2 core isn't ready to use
Install dependencies
OpenCV3 is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ros2 bases on python3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
Now cv_bridge python backend still has dependency on python boost (equal or higer than 1.58.0), and install them as follows in Ubuntu 16.04:
sudo apt install libboost-python1.58.0
cd /usr/lib/x86_64-linux-gnu/ && sudo ln -s libboost_python-py35.so libboost_python3.so
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>
git clone https://github.com/ros-perception/vision_opencv.git
cd vision_opencv
git checkout ros2
colcon build --symlink-install
Run the tests
Python tests have dependency to opencv python support and install it:
pip3 install opencv-python
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higer instead - Not verify with Windows and OS X environment and there may be building or running issues
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake_ros | |
| 2 | python_cmake_module | |
| 1 | ament_index_python | |
| 1 | ament_cmake_gtest | |
| 1 | ament_cmake_pytest | |
| 1 | ament_lint_auto | |
| 1 | ament_lint_common | |
| 2 | sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 2.1.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2019-04-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Ethan Gao
Authors
- Patrick Mihelich
- James Bowman
cv_bridge
Introduction
cv_bridge converts between ROS2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ros2 core has already been installed, please refer to ROS2 installation to get started if the ros2 core isn't ready to use
Install dependencies
OpenCV3 is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ros2 bases on python3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
Now cv_bridge python backend still has dependency on python boost (equal or higer than 1.58.0), and install them as follows in Ubuntu 16.04:
sudo apt install libboost-python1.58.0
cd /usr/lib/x86_64-linux-gnu/ && sudo ln -s libboost_python-py35.so libboost_python3.so
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>
git clone https://github.com/ros-perception/vision_opencv.git
cd vision_opencv
git checkout ros2
colcon build --symlink-install
Run the tests
Python tests have dependency to opencv python support and install it:
pip3 install opencv-python
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higer instead - Not verify with Windows and OS X environment and there may be building or running issues
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake_ros | |
| 2 | python_cmake_module | |
| 1 | ament_index_python | |
| 1 | ament_cmake_gtest | |
| 1 | ament_cmake_pytest | |
| 1 | ament_lint_auto | |
| 1 | ament_lint_common | |
| 2 | sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 1.13.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2018-04-30 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 1.12.8 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2018-04-16 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 0 | opencv3 | |
| 2 | rosconsole | |
| 2 | sensor_msgs | |
| 1 | catkin | |
| 2 | rostest |
System Dependencies
| Name |
|---|
| boost |
| python |
| dvipng |
| python-numpy |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 1.12.8 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2018-04-16 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 0 | opencv3 | |
| 2 | rosconsole | |
| 2 | sensor_msgs | |
| 1 | catkin | |
| 2 | rostest |
System Dependencies
| Name |
|---|
| boost |
| python |
| dvipng |
| python-numpy |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 1.11.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2017-11-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 1.11.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2017-11-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at answers.ros.org
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
Package Summary
| Tags | No category tags. |
| Version | 1.10.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | groovy-devel |
| Last Updated | 2014-10-28 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Could not convert RST to MD: No such file or directory - pandoc