
Package Summary
| Tags | No category tags. |
| Version | 0.0.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_demos.git |
| VCS Type | git |
| VCS Version | 0.0.4 |
| Last Updated | 2017-03-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Masaki Murooka
Authors
- Masaki Murooka
drc_task_common
Introduction
provides drc_task_ common task programs.
Setup
- Setup your account allowing sudo without password and keep environmental variable.
It's required to use socket port 1-1023.
Run following command
$ sudo visudo
And add these lines:
YOUR_ACCOUNT ALL=(ALL) NOPASSWD:ALL
Defaults env_keep += "PYTHONPATH"
Defaults env_keep += "ROS_PACKAGE_PATH"
Defaults env_keep += "ROS_MASTER_URI"
And restart your computer.
- speed up roslaunch
sudo patch -u /usr/lib/python2.7/dist-packages/catkin_pkg/packages.py < $(rospack find drc_task_common)/patch/catkin_packages.patch
- Set enviroment variable "ROBOT" For example,
export ROBOT=HRP2JSKNT
or
export ROBOT=JAXON
drc_task_common.launch
DEVICE
this program needs * 3D mouse (for move t-marker) * B-Controll (for some bottuns) * Track ball mouse (for move robot head)
DEPEND
$ sudo aptitude install python-pygame
$ sudo pip install fysom
$ sudo aptitude install spacenavd ros-hydro-spacenav-node
$ sudo aptitude install python-urlgrabber
How to launch
You should put two commands in the defferent terminal
roslaunch drc_task_common operator_station_main.launch
roslaunch drc_task_common field_computer_main.launch
How to Use B-Controll Interface
B-Controll provides 2x8 Buttons and 8 bars. This Section Introduces how to use buttons

for more details, please read source codes https://github.com/jsk-ros-pkg/jsk_demos/blob/master/jsk_2015_06_hrp_drc/drc_task_common/scripts/b_control_client.py provides bottun interface
Upper, (1, 2, 3) From the Left,(Box, Cylinder, Torus) Button
Change Transformable Marker Type, for (Box, Cylinder, Torus) Like Objects.
Upper, 4 From the Left, SETPOS Button
Auto Move Robot Before T-Object Marker.(Maybe before 50cm from Objects, But Needs Some Changes)
Upper, 5 From the Left, GOPOS Button
Go Pos From Real Pos To Robot Marker Pos. (Push U8 or D8 to Select)
Upper, 6 From the Left, Save Button
SAVE CURRENT OBJECT POSE(for moving object)
Upper, 7 From the Left, TOGGLE Button
Not Used
Lower, 1 From the Left, APPROACH Button
Change IK mode * None (Simply solve IK with the coords) * Reach (Solve IK to Reach object coords) * Release (Solve IK to Release object) current mode is displayed on rviz.
Lower, 2 From the Left, Mode Button
Change Marker Setting Mode, * autoset (object will be set by click b-box) * manuset (manual set object with 3d mouse) * assoc (object will be assoced to robot hand coords) current mode is displayed on rviz.
Lower, 3 From the Left, Menu Button
Launch Menu * reverse (reverse object coords (z-axis will be reversed)) * chancel (close menu)
Lower, 4 From the Left, IK Button
solve IK with current robot pos and current t-object coords, Robot model will be change pose with the result
Lower, 5 From the Left, Angle Button
send robot model's angle to real robot, You can change the velocity by changing the most right bar.
Lower, 6 From the Left, Menu Button
Launch Robot menu * cancel * switch irm (change ik arm) * inverse-reachabily-map-mode * reachability-map-mode * reset pose (change robot model pose) * reset pose (::)
Trouble Shoot
Q. I can't move robot-head.
A. You should change mode for mouse, first, to know if mouse is connected
sudo hexdump mouse0
then, you should put command
sudo chmod 644 mouse0
Q. The following error occurred.
Traceback (most recent call last):
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/scripts/midi_config_player.py", line 97, in <module>
main()
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/scripts/midi_config_player.py", line 63, in main
controller = openMIDIInputByName(config["device_name"])
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/src/jsk_teleop_joy/midi_util.py", line 83, in openMIDIInputByName
return openMIDIByName(device_name, 1)
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/src/jsk_teleop_joy/midi_util.py", line 97, in openMIDIByName
raise MIDIException("Cannot find the device: %s" % (device_name))
A. MIDI controller (B-CONTROL) is not connected.
Q. The following error occurred.
Traceback (most recent call last):
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/joy_mouse/scripts/mouse.py", line 20, in <module>
rospy.get_param("~frame_id", "mouse"))
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/joy_mouse/src/joy_mouse/joy.py", line 33, in main
with open(device_name, "rb" ) as tp_file:
IOError: [Errno 13] Permission denied: '/dev/input/mouse0'
A. Track Ball is not connected.
Q. The following error occurred.
Traceback (most recent call last):
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/scripts/head_control_by_trackball.py", line 153, in <module>
main()
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/scripts/head_control_by_trackball.py", line 148, in main
controller.main()
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/scripts/head_control_by_trackball.py", line 132, in main
self.enableHeadGroupControl()
File "/home/leus/ros/hydro/src/jsk-ros-pkg/jsk_control/jsk_teleop_joy/scripts/head_control_by_trackball.py", line 83, in enableHeadGr
oupControl
self.enable_head_joint_group_srv(gname='head', jnames=[self.pitch_joint_name, self.yaw_joint_name])
File "/opt/ros/hydro/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 435, in __call__
return self.call(*args, **kwds)
File "/opt/ros/hydro/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 495, in call
service_uri = self._get_service_uri(request)
File "/opt/ros/hydro/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 463, in _get_service_uri
raise ServiceException("service [%s] unavailable"%self.resolved_name)
rospy.service.ServiceException: service [/SequencePlayerServiceROSBridge/addJointGroup] unavailable
A. hrpsys_ros_bridge is not launched.
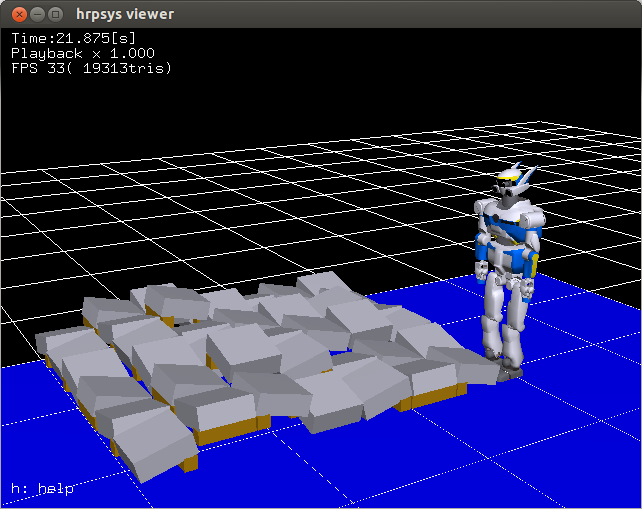
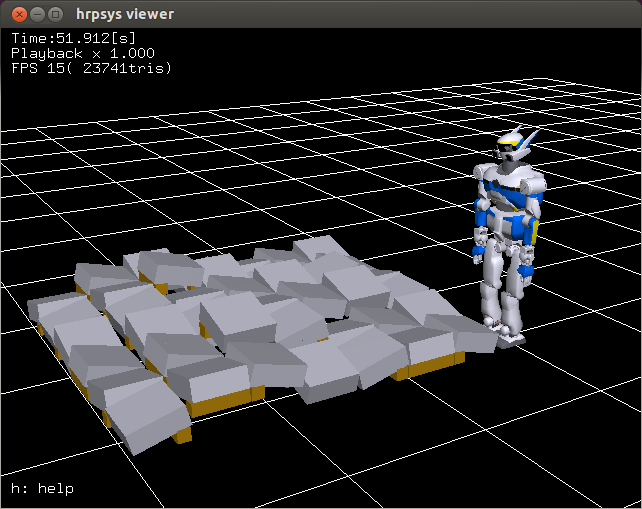
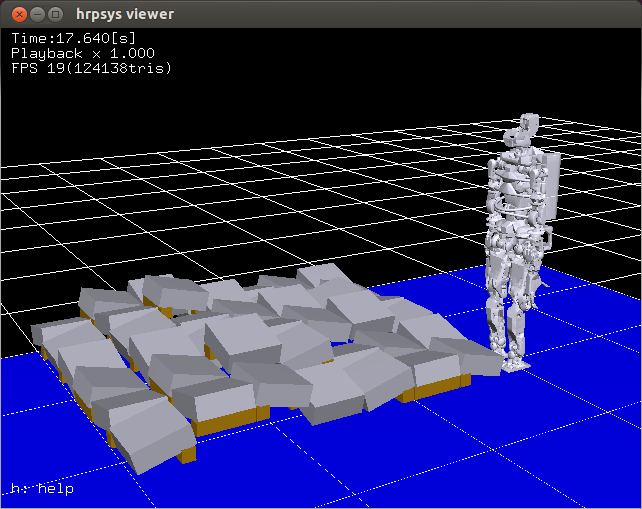
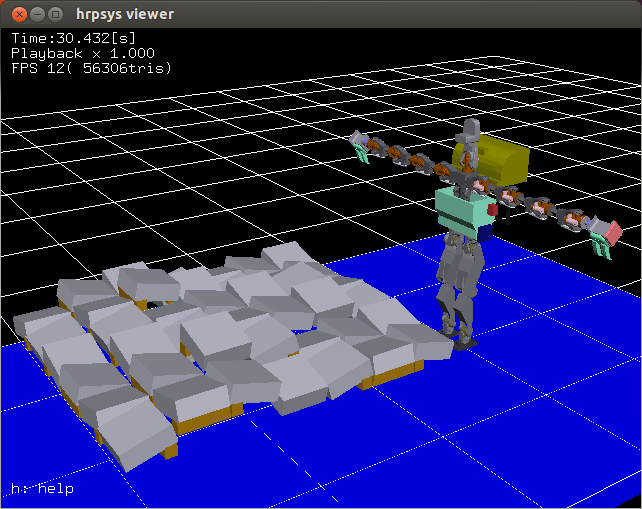
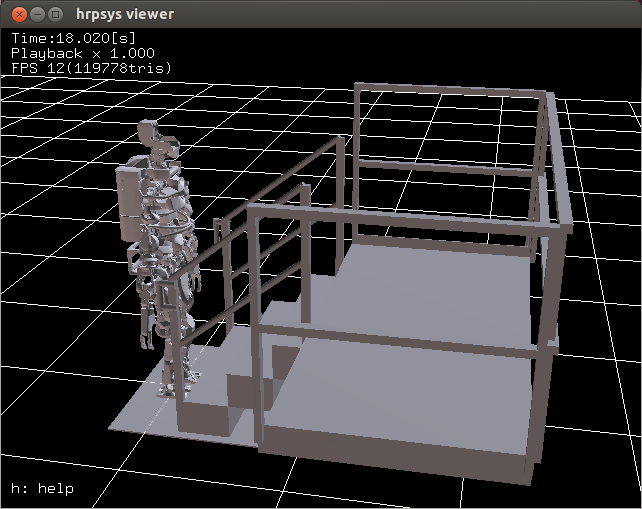
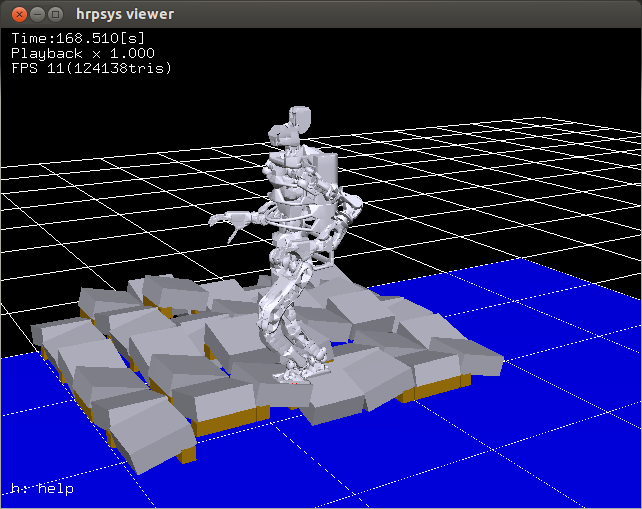
test-drc-terrain-walk.l
This is kinematics (not dynamics) simulator of test terrain walk for DRC
How to launch
You should generate xml file from wrl files, and launch the following for each robot
hrp2jsknt
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSKNT_for_OpenHRP3/HRP2JSKNTmain.wrl OUTPUT:=/tmp/HRP2JSKNT_for_DRCTestbedTerrainJPBlock.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestbedTerrainJPBlock.wrl,0.4,-2.0,0,1,0,0,0" CORBA_PORT:=15005 INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsknt.launch PROJECT_FILE:=/tmp/HRP2JSKNT_for_DRCTestbedTerrainJPBlock.xml
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSKNT_for_OpenHRP3/HRP2JSKNTmain.wrl OUTPUT:=/tmp/HRP2JSKNT_for_DRCTestfieldTerrain.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestfieldTerrain.wrl,0.4,-2.1,0,1,0,0,0" CORBA_PORT:=15005 INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsknt.launch PROJECT_FILE:=/tmp/HRP2JSKNT_for_DRCTestfieldTerrain.xml
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSKNT_for_OpenHRP3/HRP2JSKNTmain.wrl OUTPUT:=/tmp/HRP2JSKNT_for_DRCTestfieldStair.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestfieldStair.wrl,0.25,0,0,1,0,0,0" CORBA_PORT:=15005 INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsknt.launch PROJECT_FILE:=/tmp/HRP2JSKNT_for_DRCTestfieldStair.xml
hrp2jsk
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSK_for_OpenHRP3/HRP2JSKmain.wrl OUTPUT:=/tmp/HRP2JSK_for_DRCTestbedTerrainJPBlock.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestbedTerrainJPBlock.wrl,0.4,-2.0,0,1,0,0,0," CORBA_PORT:=15005 INTEGRATE:=false CONF_DT_OPTION:="--dt 0.004" SIMULATION_TIMESTEP_OPTION:="--timeStep 0.004"
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsk.launch PROJECT_FILE:=/tmp/HRP2JSK_for_DRCTestbedTerrainJPBlock.xml
hrp2jsknts
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSKNTS_for_OpenHRP3/HRP2JSKNTSmain.wrl OUTPUT:=/tmp/HRP2JSKNTS_for_DRCTestbedTerrainJPBlock.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestbedTerrainJPBlock.wrl,0.4,-2.0,0,1,0,0,0" CORBA_PORT:=15005 INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsknts.launch PROJECT_FILE:=/tmp/HRP2JSKNTS_for_DRCTestbedTerrainJPBlock.xml
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSKNTS_for_OpenHRP3/HRP2JSKNTSmain.wrl OUTPUT:=/tmp/HRP2JSKNTS_for_DRCTestfieldTerrain.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestfieldTerrain.wrl,0.4,-2.1,0,1,0,0,0" CORBA_PORT:=15005 INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsknts.launch PROJECT_FILE:=/tmp/HRP2JSKNTS_for_DRCTestfieldTerrain.xml
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find hrp2_models`/HRP2JSKNTS_for_OpenHRP3/HRP2JSKNTSmain.wrl OUTPUT:=/tmp/HRP2JSKNTS_for_DRCTestfieldStair.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestfieldStair.wrl,0.18,0,0,1,0,0,0" CORBA_PORT:=15005 INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials hrp2jsknts.launch PROJECT_FILE:=/tmp/HRP2JSKNTS_for_DRCTestfieldStair.xml
jaxon
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find jsk_models`/JAXON/JAXONmain.wrl OUTPUT:=/tmp/JAXON_for_DRCTestbedTerrainJPBlock.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestbedTerrainJPBlock.wrl,0.4,-2.0,0,1,0,0,0" CORBA_PORT:=15005 CONF_DT_OPTION:="--dt 0.002" SIMULATION_TIMESTEP_OPTION:="--timeStep 0.002" INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials jaxon.launch PROJECT_FILE:=/tmp/JAXON_for_DRCTestbedTerrainJPBlock.xml
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find jsk_models`/JAXON/JAXONmain.wrl OUTPUT:=/tmp/JAXON_for_DRCTestfieldTerrain.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestfieldTerrain.wrl,0.4,-2.1,0,1,0,0,0" CORBA_PORT:=15005 CONF_DT_OPTION:="--dt 0.002" SIMULATION_TIMESTEP_OPTION:="--timeStep 0.002" INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials jaxon.launch PROJECT_FILE:=/tmp/JAXON_for_DRCTestfieldTerrain.xml
staro
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find jsk_models`/STARO/STAROmain.wrl OUTPUT:=/tmp/STARO_for_DRCTestbedTerrainJPBlock.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestbedTerrainJPBlock.wrl,0.4,-2.0,0,1,0,0,0" CORBA_PORT:=15005 CONF_DT_OPTION:="--dt 0.002" SIMULATION_TIMESTEP_OPTION:="--timeStep 0.002" INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials staro.launch PROJECT_FILE:=/tmp/STARO_for_DRCTestbedTerrainJPBlock.xml
jaxon(stair)
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find jsk_models`/JAXON/JAXONmain.wrl OUTPUT:=/tmp/JAXON_for_DRCTestbedStair.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestbedStair.wrl,0.25,0.0,0,1,0,0,0," CORBA_PORT:=15005 CONF_DT_OPTION:="--dt 0.002" SIMULATION_TIMESTEP_OPTION:="--timeStep 0.002" INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials jaxon.launch PROJECT_FILE:=/tmp/JAXON_for_DRCTestbedStair.xml
rtmtest -t hrpsys_tools _gen_project.launch INPUT:=`rospack find jsk_models`/JAXON/JAXONmain.wrl OUTPUT:=/tmp/JAXON_for_DRCTestfieldStair.xml OBJECT_MODELS:="`rospack find hrpsys`/share/hrpsys/samples/environments/DRCTestfieldStair.wrl,0.15,0,0,1,0,0,0" CORBA_PORT:=15005 CONF_DT_OPTION:="--dt 0.002" SIMULATION_TIMESTEP_OPTION:="--timeStep 0.002" INTEGRATE:=false
rtmlaunch hrpsys_ros_bridge_tutorials jaxon.launch PROJECT_FILE:=/tmp/JAXON_for_DRCTestfieldStair.xml
Load euslisp
Load main euslisp program "test-drc-terrain-walk.l"
First,you should start roseus
roscd drc_task_common/euslisp
git pull origin master
roseus
And load "test-drc-terrain-walk.l"
(load "test-drc-terrain-walk.l")
Try terrain walk simulation
Try terrain walking simulation for each robot (hrp2jsknt, hrp2jsk, jaxon, staro)
Setup pose
Load each robot interface.l and send walking-pose and command (objects (list robot rleg-sole lleg-sole terrain))
(setup-drc-testbed-terrain-simulation-hrp2jsknt)
(setup-drc-testbed-terrain-simulation-hrp2jsk)
(setup-drc-testbed-terrain-simulation-jaxon)
(setup-drc-testbed-terrain-simulation-staro)
Walk 1 step
One step terrain walk simulation for each robot by footstep
Footstep arguments are (rleg-fwd-offset[mm] lleg-fwd-offset[mm])
(test-drc-testbed-simulation-common-one 280 280)
For example, jaxon
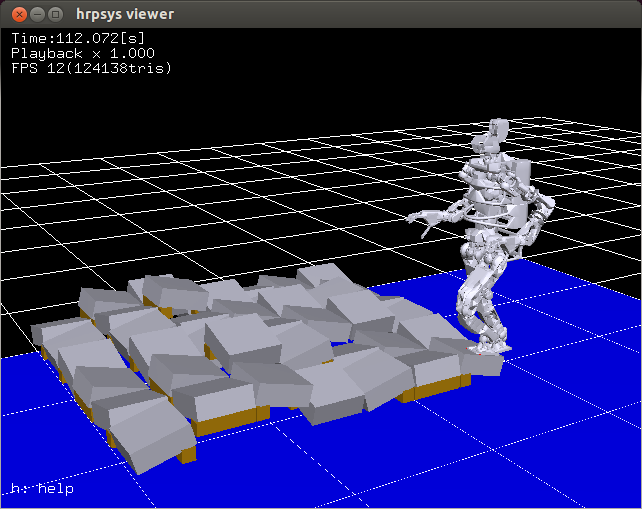
Walk straight by some steps
One through terrain walk simulation by some steps for each robot by footstep
(test-drc-testbed-terrain-simulation-hrp2jsknt)
(test-drc-testbed-terrain-simulation-hrp2jsk)
(test-drc-testbed-terrain-simulation-jaxon)
(test-drc-testbed-terrain-simulation-staro)
For example, jaxon
Try stair climb simulation
Try stair climbing simulation for jaxon
Setup pose
Load robot interface.l and send walking-pose and command (objects (list robot rleg-sole lleg-sole stair))
(setup-drc-testbed-stair-simulation-jaxon)
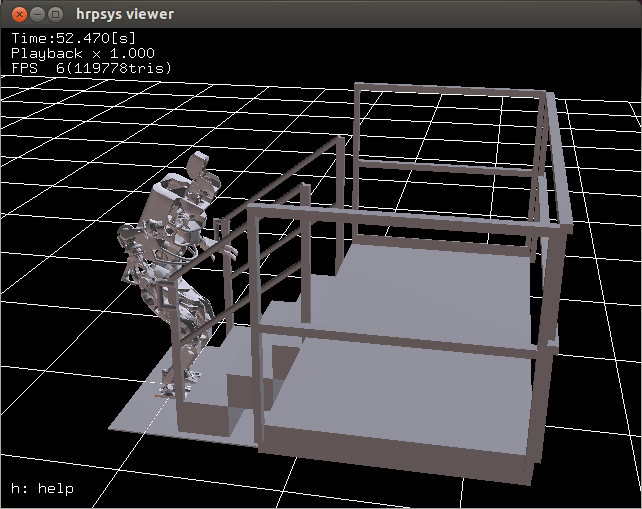
Climb stair
Climb stair simulation for jaxon by footstep
Initial position offset parameters are given by :x-offset(0.05[m] by default) and :yaw-offset(-30[deg] by default)
(test-drc-testbed-stair-simulation-jaxon :x-offset 0.05 :yaw-offset -30)
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| yaml-cpp |
| python-fysom |
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| drc_valve_task | github-jsk-ros-pkg-jsk_demos |
Launch files
- config/door/record.launch
-
- bag
- config/valve/record.launch
-
- bag
- launch/color_histogram_2d_matcher.launch
-
- only_recognition_with_openni [default: false]
- image [default: /camera/rgb/image_rect_color]
- info [default: /camera/rgb/camera_info]
- image [default: /camera_remote/rgb/image_rect_color]
- info [default: /camera_remote/rgb/camera_info]
- launch/field_computer_main_fc.launch
- launch/deprecated/drc_task_common.launch
-
- default_frame_id [default: odom_on_ground]
- only_recognition_with_openni [default: false]
- robot_name [default: hrp2jsknts]
- ROBOT_URDF_MODEL [default: $(find hrpsys_ros_bridge_tutorials)/models/HRP2JSKNTS.urdf.xacro]
- robot_model_config [default: $(find drc_task_common)/config/hrp2_interactive_marker.yaml]
- ik_server_launch [default: hrp2jsknts-ik-server.launch]
- trackball_head_launch [default: hrp2_trackball_head.launch]
- multi_plane_segmentation_input [default: /move_group/filtered_cloud]
- multi_plane_segmentation_base_frame_id [default: odom]
- only_recognition_with_openni [default: $(arg only_recognition_with_openni)]
- BASE_FRAME_ID [default: $(arg multi_plane_segmentation_base_frame_id)]
- default_frame_id [default: $(arg default_frame_id)]
- ik_server_launch [default: $(arg ik_server_launch)]
- default_frame_id [default: $(arg default_frame_id)]
- robot_model_config [default: $(arg robot_model_config)]
- ROBOT_URDF_MODEL [default: $(arg ROBOT_URDF_MODEL)]
- default_frame_id [default: $(arg default_frame_id)]
- default_frame_id [default: $(arg default_frame_id)]
- trackball_head_launch [default: $(arg trackball_head_launch)]
- default_frame_id [default: $(arg default_frame_id)]
- launch/deprecated/drc_task_common_hrp2jsknts.launch
- launch/deprecated/drc_task_common_staro.launch
- launch/deprecated/drc_task_common_hrp2jsknt.launch
- launch/deprecated/drill_recognition_demo.launch
- launch/conservative_valve_detection.launch
-
- INTERACTIVE [default: false]
- RESOLUTION [default: 0.01]
- SIMULATION [default: false]
- GLC_RECORD [default: false]
- PROCESSING_FRAME [default: odom]
- VALVE_CORRESPONDENCE_DISTANCE [default: 0.1]
- TORUS_FINDER_OUTLIER_THRESHOLD [default: 0.05]
- INPUT_CLOUD [default: /full_cloud2]
- VIEWER [default: true]
- launch/joy_teleop.launch
-
- dev [default: /dev/input/js0]
- launch_joy [default: true]
- launch/conservative_detection.launch
-
- GLC_RECORD [default: false]
- SIMULATION [default: false]
- launch/irex_sift.launch
-
- feature_node [default: imagesift]
- image [default: /multisense/left/image_rect_color]
- camera_info [default: /multisense/left/camera_info]
- launch/ocs/ocs_misc.launch
- launch/ocs/ocs_rviz.launch
-
- ocs [default: true]
- INPUT_CLOUD [default: /ocs/communication/point_cloud]
- INPUT_CLOUD [default: /multisense/organized_image_points2_color]
- default_frame_id [default: odom_on_ground]
- ik_server_launch [default: hrp2jsknts-ik-server.launch]
- robot_model_config [default: $(find drc_task_common)/config/robot_interactive_marker.yaml]
- default_frame_id [default: $(arg default_frame_id)]
- ik_server_launch [default: $(arg ik_server_launch)]
- ocs [default: $(arg ocs)]
- default_frame_id [default: $(arg default_frame_id)]
- default_frame_id [default: $(arg default_frame_id)]
- robot_model_config [default: $(arg robot_model_config)]
- default_frame_id [default: $(arg default_frame_id)]
- enable_trackball_head [default: false]
- launch/ocs/models/HRP2JSKNT.launch
- launch/ocs/models/JAXON.launch
- launch/ocs/models/HRP2JSKNTS.launch
- launch/ocs/models/JAXON_RED.launch
- launch/ocs/models/HRP2JSK.launch
- launch/ocs/ui.launch
-
- INPUT_IMAGE [default: /ocs/communication/image_rect_color]
- INPUT_PANORAMA_IMAGE [default: /ocs/communication/panorama_image]
- INPUT_IMAGE_WIDTH_SCALE [default: /ocs/communication/image_width_scale]
- INPUT_IMAGE_HEIGHT_SCALE [default: /ocs/communication/image_height_scale]
- INPUT_PANORAMA_IMAGE_WIDTH_SCALE [default: /ocs/communication/panorama_width_scale]
- INPUT_PANORAMA_IMAGE_HEIGHT_SCALE [default: /ocs/communication/panorama_height_scale]
- UI_FILE [default: rqt_ui.perspective]
- launch/ocs/ocs_locomotion_planner.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_SIMULATION [default: false]
- ocs [default: true]
- launch/ocs/ui_interaction_scale.launch
-
- INPUT_IMAGE
- INPUT_IMAGE_HEIGHT_SCALE
- INPUT_IMAGE_WIDTH_SCALE
- launch/ocs/ocs_locomotion.launch
-
- ocs [default: true]
- USE_SIMULATION [default: false]
- locomotion_cloud [default: /ocs/communication/locomotion_cloud]
- locomotion_cloud [default: /locomotion/normal_filtered_points/output]
- flip_cloud [default: /ocs/communication/normal_flip_cloud]
- flip_cloud [default: /locomotion/normal_flip/output]
- launch/ocs/ocs_executive.launch
-
- ocs [default: true]
- launch/ocs/vehicle_ocs.launch
-
- LAUNCH_UI [default: true]
- LAUNCH_STEERING [default: false]
- LAUNCH_PS3JOY [default: true]
- LAUNCH_RVIZ [default: false]
- CONTROLLER_DEV [default: /dev/input/js0]
- OCS_NS [default: ocs]
- CONTROLLER_DEV [default: $(arg CONTROLLER_DEV)]
- OCS_NS [default: $(arg OCS_NS)]
- CONTROLLER_DEV [default: $(arg CONTROLLER_DEV)]
- OCS_NS [default: $(arg OCS_NS)]
- launch/ocs/b_control_ui.launch
- launch/conservative_door_viewer.launch
-
- GLC_RECORD [default: false]
- launch/manipulation_data_processor.launch
-
- default_frame_id [default: odom_on_ground]
- all_manual [default: false]
- use_with_service [default: true]
- launch/fc/hose_grasp.launch
- launch/fc/fc_misc.launch
- launch/fc/stereo_preprocess.launch
-
- INPUT_POINT_CLOUD [default: /multisense/resize_1_4/points]
- launch/fc/fc_executive.launch
-
- fc [default: true]
- launch/fc/drill_recognition_for_put.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/resize_1_4/points]
- INPUT_HINT_POINT_CLOUD [default: /multisense/resize_1_4/points]
- DEBUG_VIEW [default: false]
- launch/fc/laser_preprocess.launch
-
- ODOM_FRAME [default: odom]
- launch/fc/drill_recognition.launch
- launch/fc/fisheye_lookat.launch
-
- DEBUG [default: false]
- INPUT_POINT [default: /fisheye/input]
- launch/fc/drill_recognition_for_wall.launch
-
- DEBUG [default: false]
- launch/fc/drive.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/resize_1_4/points]
- CAMERA_FRAME [default: multisense/left_camera_optical_frame]
- DEBUG [default: true]
- LAUNCH_DYNAMIC_TF_PUBLISHER [default: true]
- launch/fc/vehicle/extract_obstacle_cloud.launch
-
- BASE_FRAME_ID [default: car_center]
- CREATE_MANAGER [default: true]
- MANAGER [default: drive_manager]
- launch/fc/vehicle/obstacle_detection.launch
- launch/fc/vehicle/ocs_car_center_publisher.launch
-
- MACHINE [default: localhost]
- launch/fc/vehicle/steering_estimation.launch
- launch/fc/vehicle/vehicle_run_toe_kick.launch
-
- ROBOT [default: jaxon_red]
- launch/fc/vehicle/multisense_rosbag_static_tf_publisher.launch
-
- MACHINE [default: localhost]
- launch/fc/vehicle/car_center_tf_publisher.launch
-
- SIMULATION_MODE [default: false]
- REAL_MODE [default: false]
- ROSBAG_MODE [default: false]
- JAXON [default: true]
- HRP2 [default: false]
- launch/fc/vehicle/local_planner.launch
-
- VIEW [default: false]
- launch/fc/vehicle/driving_force_gt.launch
-
- CONTROLLER_DEV [default: /dev/input/js0]
- launch/fc/vehicle/handle_operation_interface.launch
-
- CONTROLLER_DEV [default: /dev/input/js0]
- OCS_NS [default: ocs]
- CONTROLLER_DEV [default: $(arg CONTROLLER_DEV)]
- launch/fc/vehicle/drive_rosbag_player.launch
-
- MACHINE [default: localhost]
- PUBLISH_STATIC_TF [default: false]
- BAGFILE_NAME [default: tmp.bag]
- ROSBAG_OPTION [default: -l --clock]
- use_resize [default: true]
- launch/fc/vehicle/driver_assist.launch
- launch/fc/vehicle/handle_pose_detector.launch
- launch/fc/vehicle/passthrough_car_body.launch
-
- INPUT_POINTS [default: /transform_cloud/input]
- OUTPUT_POINTS [default: /passthrough/car_body_filtered_points2]
- EXECUTE_FLAG [default: /drive/execute_flag]
- launch/fc/drill_standing.launch
- launch/fc/hose_connect.launch
- launch/fc/keyshot.launch
-
- RESIZE_RATE [default: 0.15]
- launch/fc/locomotion.launch
-
- INPUT_POINT_CLOUD [default: /laser_downsampler/output]
- MULTISENSE_STANDALONE [default: false]
- RUN_SELF_FILTER [default: false]
- SELF_FILTER_PARAM [default: $(find jsk_hrp2_ros_bridge)/config/$(env ROBOT)_self_filter.yaml]
- launch/fc/debri_recognition.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/organized_image_points2_color]
- DEBUG_VIEW [default: false]
- launch/fc/drill_recognition_sift.launch
-
- feature_node [default: imagesift]
- image [default: /multisense/left/image_rect_color]
- camera_info [default: /multisense/left/camera_info]
- launch/fc/door_unvisible_handle_recognition.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /laser_preprocess/camera_laser_cloud/output]
- INPUT_HINT_POINT_CLOUD [default: /laser_preprocess/camera_laser_cloud/output]
- DEBUG_VIEW [default: false]
- launch/fc/drill_recognition_in_hand.launch
- launch/fc/drill_sift.launch
- launch/fc/drill_recognition_for_grasp.launch
-
- INPUT_POINT_CLOUD [default: /multisense/organized_image_points2_color]
- PASS_THROUGH [default: true]
- launch/fc/door_recognition.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_HINT_POINT_CLOUD [default: /laser_preprocess/camera_laser_cloud/output]
- INPUT_POINT_CLOUD [default: /laser_preprocess/camera_laser_cloud/output]
- DEBUG_VIEW [default: false]
- launch/fc/locomotion_planner.launch
-
- REFINE_FOOTSTEP [default: true]
- launch/fc/drill_button_checker.launch
- launch/fc/centroid_of_pointcloud_in_rect.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/organized_image_points2_color]
- DEBUG_VIEW [default: false]
- launch/fc/vehicle.launch
-
- FC_MODE [default: true]
- OCS_MODE [default: false]
- CONTROLLER_DEV [default: /dev/input/js0]
- OCS_NS [default: ocs]
- LAUNCH_HANDLE_DETECTOR [default: $(arg FC_MODE)]
- LAUNCH_UI [default: $(arg OCS_MODE)]
- LAUNCH_STEERING [default: false]
- LAUNCH_PS3JOY [default: $(arg OCS_MODE)]
- LAUNCH_EUS [default: $(arg FC_MODE)]
- LAUNCH_RVIZ [default: $(arg OCS_MODE)]
- LAUNCH_CAR_CENTER [default: $(arg FC_MODE)]
- LAUNCH_RECOGNITION [default: $(arg FC_MODE)]
- ROBOT [default: robot]
- CONTROLLER_DEV [default: $(arg CONTROLLER_DEV)]
- OCS_NS [default: $(arg OCS_NS)]
- CONTROLLER_DEV [default: $(arg CONTROLLER_DEV)]
- OCS_NS [default: $(arg OCS_NS)]
- REAL_MODE [default: true]
- JAXON [default: true]
- HRP2 [default: false]
- launch/fc/vehicle_fc.launch
-
- LAUNCH_HANDLE_DETECTOR [default: true]
- LAUNCH_EUS [default: true]
- LAUNCH_CAR_CENTER [default: true]
- LAUNCH_RECOGNITION [default: true]
- ROBOT [default: robot]
- REAL_MODE [default: true]
- launch/fc/go_pos.launch
- launch/fc/panorama.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/organized_image_points2_color]
- DEBUG_VIEW [default: false]
- launch/fc/lookat.launch
-
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT [default: /lookat/input]
- launch/fc/valve_recognition.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/resize_1_4/points]
- DEBUG [default: false]
- launch/fc/zbar_ros_for_cameras.launch
- launch/fc/drill_recognition_for_button.launch
-
- INPUT_IMAGE [default: /multisense/left/image_rect_color]
- INPUT_CAMERA_INFO [default: /multisense/left/camera_info]
- INPUT_POINT_CLOUD [default: /multisense/resize_1_8/points]
- PASS_THROUGH [default: true]
- launch/robot_motion.launch
-
- default_frame_id [default: odom_on_ground]
- ik_server_launch [default: hrp2jsknts-ik-server.launch]
- ocs [default: true]
- launch/teleop_interface.launch
- launch/remote_server.launch
- launch/teleop_device.launch
-
- b_control_joy_topic [default: /b_control/joy]
- spacenav_joy_topic [default: /spacenav/joy]
- default_frame_id [default: odom_on_ground]
- use_icp [default: true]
- trackball_head_launch [default: hrp2_trackball_head.launch]
- enable_trackball_head [default: true]
- launch_joy [default: false]
- launch/field_computer_main.launch
-
- FC_IP [default: localhost]
- OCS_IP [default: localhost]
- USE_LOCALHOST [default: false]
- USE_COM [default: true]
- launch/conservative_valve_viewer.launch
-
- GLC_RECORD [default: false]
- launch/robot_model.launch
-
- LAUNCH_DYNAMIC_TF_PUBLISHER [default: true]
- default_frame_id [default: odom_on_ground]
- marker_tf_prefix [default: /jsk_model_marker_interface/robot]
- PUBLISH_CAMERA_INFO [default: false]
- PUBLISH_REACHABLE_MAP [default: false]
- robot_model_config [default: $(find drc_task_common)/config/robot_interactive_marker.yaml]
- launch/image_transport.launch
-
- USE_SNAPSHOT [default: true]
- USE_THROTTLE [default: true]
- USE_MJPEGSERVER [default: false]
- USE_ROTATED [default: false]
- USE_EDGE [default: true]
- THROTTLE_RATE [default: 1.4]
- THROTTLE_RESIZE_RATE [default: 0.1]
- THROTTLE_IMAGE_TYPE [default: image_rect]
- THROTTLE_USE_MESSAGES [default: flase]
- THROTTLE_PERIOD [default: 3]
- SNAPSHOT_RESIZE_RATE [default: 0.25]
- SNAPSHOT_IMAGE_TYPE [default: image_rect]
- MJPEGSERVER_PORT [default: 8181]
- GAZEBO_MODE [default: false]
- LAUNCH_MANAGER [default: true]
- IMAGE_NODELET_MANAGER [default: image_transport_nodelet_manager]
- GDB [default: false]
- launch/transformable_model.launch
-
- default_frame_id [default: odom_on_ground]
- launch/operator_station_main_jaxon.launch
-
- ik_server_launch [default: jaxon-ik-server.launch]
- launch/operator_station_main.launch
-
- ik_server_launch [default: hrp2jsknts-ik-server.launch]
- FC_IP [default: localhost]
- OCS_IP [default: localhost]
- USE_COM [default: true]
- default_frame_id [default: odom_on_ground]
- robot_model_config [default: $(find drc_task_common)/config/robot_interactive_marker.yaml]
- USE_RVIZ_UI [default: true]
- launch/operator_station_main_ocs.launch
- launch/conservative_door_detection.launch
-
- INTERACTIVE [default: false]
- INPUT_CLOUD [default: /full_cloud2]
- RESOLUTION [default: 0.01]
- SIMULATION [default: false]
- GLC_RECORD [default: false]
- VIEWER [default: true]
- launch/joy_single.launch
-
- dev [default: /dev/input/js0]
- launch/vehicle_operator_station_main.launch
-
- FC_IP [default: localhost]
- OCS_IP [default: localhost]
- USE_COM [default: true]
- ROBOT [default: robot]
- USE_VEHICLE_LAUNCH [default: true]
- CONTROLLER_DEV [default: /dev/input/js0]
- OCS_NS [default: ocs]
- CONTROLLER_DEV [default: $(arg CONTROLLER_DEV)]
- OCS_NS [default: $(arg OCS_NS)]
- launch/object_detect.launch
-
- only_recognition_with_openni [default: false]
- FIND_DRILL_WITH_HISTOGRAM [default: false]
- COLOR_HISTOGRAM [default: false]
- TRACKING [default: false]
- INPUT [default: /move_group/filtered_cloud]
- INPUT [default: /camera/depth_registered/points]
- BASE_FRAME_ID [default: odom]
- launch/vehicle_field_computer_main.launch
-
- FC_IP [default: localhost]
- OCS_IP [default: localhost]
- USE_COM [default: true]
- ROBOT [default: robot]
- USE_VEHICLE_LAUNCH [default: true]