
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
Package Summary
| Tags | No category tags. |
| Version | 0.1.15 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-04-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
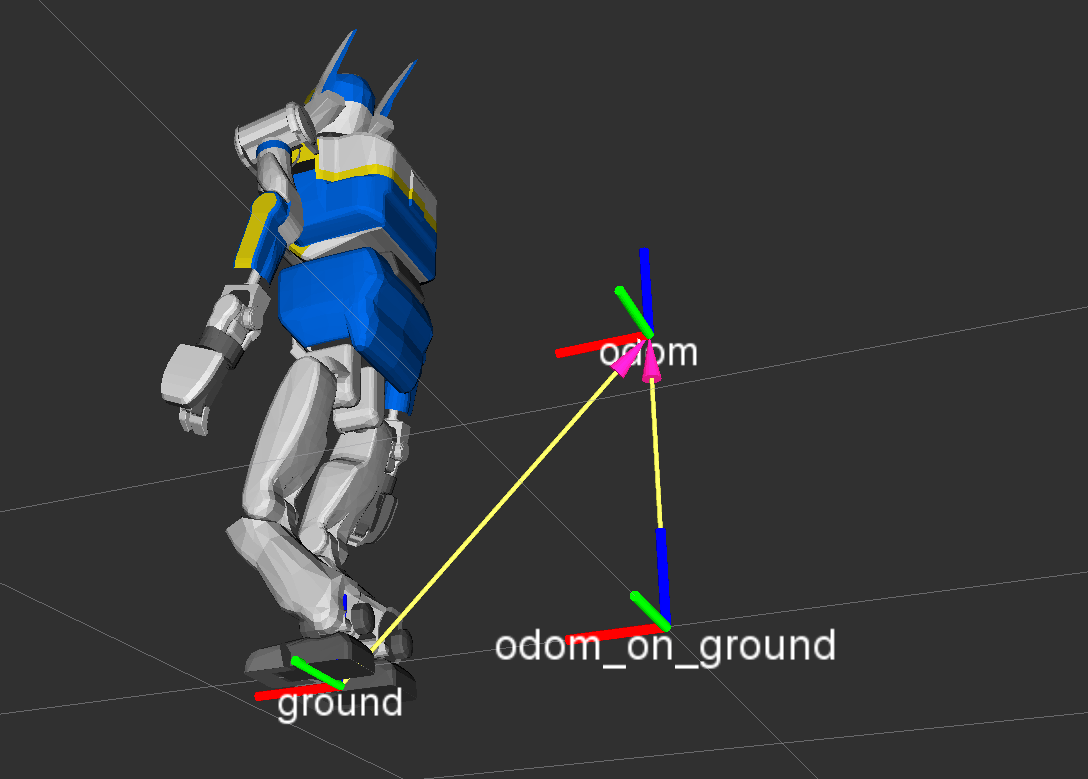
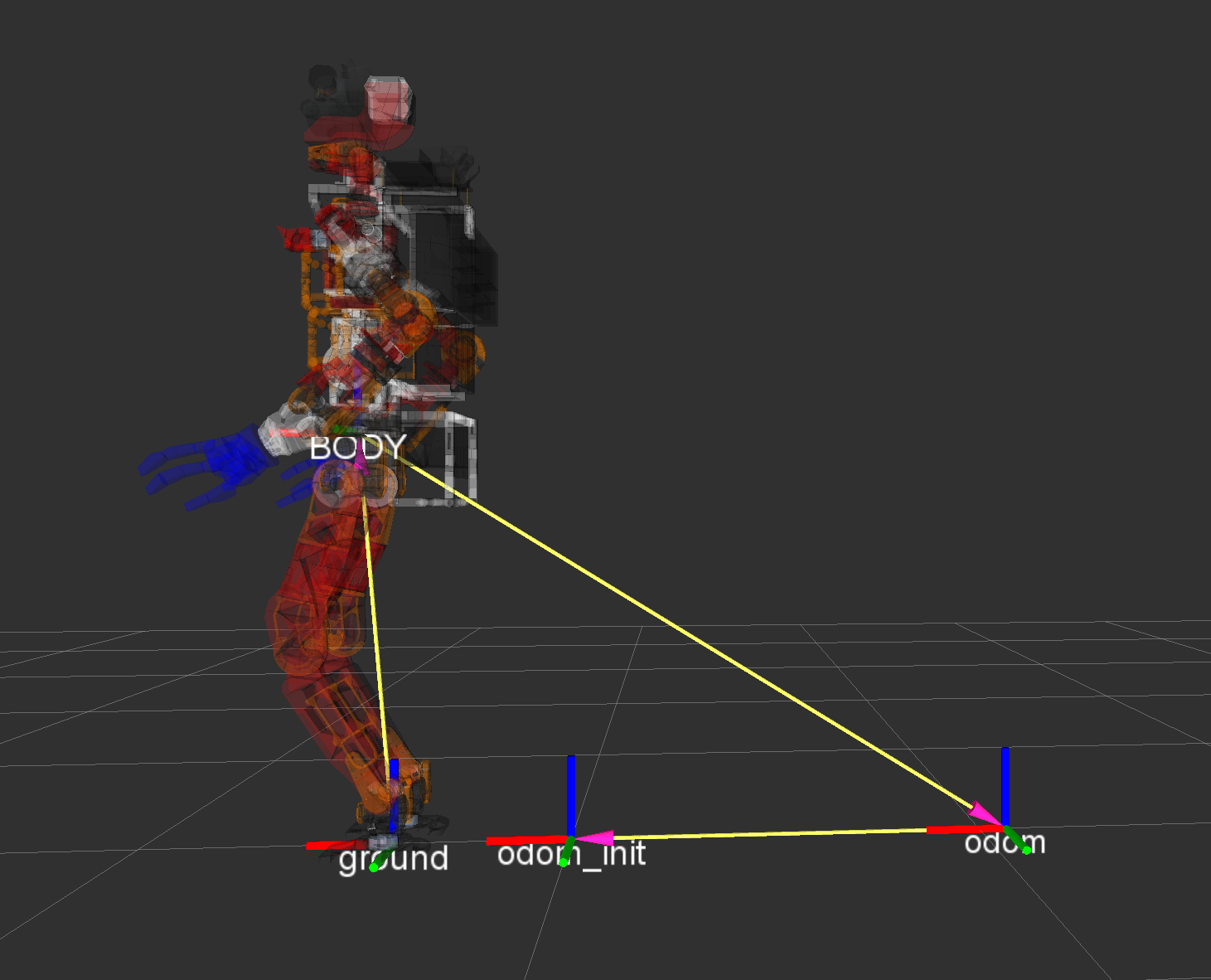
footcoords publishes three tf frames usefule for biped robots.
* /ground: the middle coordinate of two legs. Two legs are specified
by ~lleg_end_coords and ~rleg_end_coords.
* /odom_on_ground: The coordinate computing by projecting /odom on the plane which is defined by /ground frame. The transformation is updated only if the robot on the floow by checking
both of lfsensor and rfsensor provides enough force (the threshold is ~force_threshold).
* /odom_init: The coordinate of /odom when the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)
footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):
State of the robot and it is one of "air", "ground", "lfoot" and "rfoot".
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)
Specifying frame_ids. See above description about these frame_ids.
* ~lfoot_frame_id (String, default: lleg_end_coords)
* ~rfoot_frame_id (String, default: rleg_end_coords)
frame_ids of end effectors of two legs.
* ~force_threshold (Double, default: 10.0)
Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)
Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| jsk_control | github-jsk-ros-pkg-jsk_control |
Launch files
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/resetpose.launch
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/test_refinement.launch
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/resetmanippose.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at answers.ros.org
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
Package Summary
| Tags | No category tags. |
| Version | 0.1.15 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-04-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
* /ground: the middle coordinate of two legs. Two legs are specified
by ~lleg_end_coords and ~rleg_end_coords.
* /odom_on_ground: The coordinate computing by projecting /odom on the plane which is defined by /ground frame. The transformation is updated only if the robot on the floow by checking
both of lfsensor and rfsensor provides enough force (the threshold is ~force_threshold).
* /odom_init: The coordinate of /odom when the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)
footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):
State of the robot and it is one of "air", "ground", "lfoot" and "rfoot".
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)
Specifying frame_ids. See above description about these frame_ids.
* ~lfoot_frame_id (String, default: lleg_end_coords)
* ~rfoot_frame_id (String, default: rleg_end_coords)
frame_ids of end effectors of two legs.
* ~force_threshold (Double, default: 10.0)
Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)
Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/resetpose.launch
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/test_refinement.launch
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/resetmanippose.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at answers.ros.org
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
Package Summary
| Tags | No category tags. |
| Version | 0.1.15 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-04-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
* /ground: the middle coordinate of two legs. Two legs are specified
by ~lleg_end_coords and ~rleg_end_coords.
* /odom_on_ground: The coordinate computing by projecting /odom on the plane which is defined by /ground frame. The transformation is updated only if the robot on the floow by checking
both of lfsensor and rfsensor provides enough force (the threshold is ~force_threshold).
* /odom_init: The coordinate of /odom when the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)
footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):
State of the robot and it is one of "air", "ground", "lfoot" and "rfoot".
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)
Specifying frame_ids. See above description about these frame_ids.
* ~lfoot_frame_id (String, default: lleg_end_coords)
* ~rfoot_frame_id (String, default: rleg_end_coords)
frame_ids of end effectors of two legs.
* ~force_threshold (Double, default: 10.0)
Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)
Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| jsk_control | github-jsk-ros-pkg-jsk_control |
Launch files
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/resetpose.launch
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/test_refinement.launch
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/resetmanippose.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at answers.ros.org
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
Package Summary
| Tags | No category tags. |
| Version | 0.1.15 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-04-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
* /ground: the middle coordinate of two legs. Two legs are specified
by ~lleg_end_coords and ~rleg_end_coords.
* /odom_on_ground: The coordinate computing by projecting /odom on the plane which is defined by /ground frame. The transformation is updated only if the robot on the floow by checking
both of lfsensor and rfsensor provides enough force (the threshold is ~force_threshold).
* /odom_init: The coordinate of /odom when the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)
footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):
State of the robot and it is one of "air", "ground", "lfoot" and "rfoot".
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)
Specifying frame_ids. See above description about these frame_ids.
* ~lfoot_frame_id (String, default: lleg_end_coords)
* ~rfoot_frame_id (String, default: rleg_end_coords)
frame_ids of end effectors of two legs.
* ~force_threshold (Double, default: 10.0)
Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)
Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/resetpose.launch
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/test_refinement.launch
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/resetmanippose.launch
- sample/sample_root_height.launch