
Package Summary
| Tags | No category tags. |
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl

![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn't implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
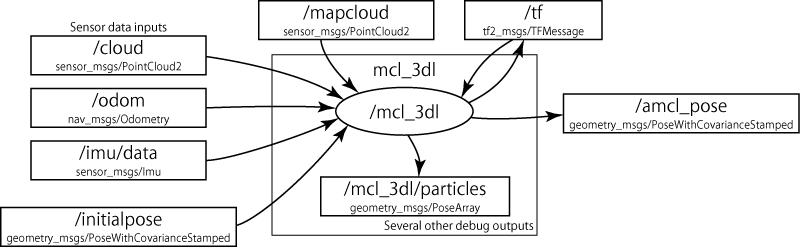
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.

MarkerArray shows several mcl_3dl internal information. - Purple spheres: sampled points used in the likelihood-model calculation - Red lines: casted rays in the beam-model calculation - Red boxes: detected collisions in raycasting
A demo without odometry is also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
Messages
Services
Plugins
Recent questions tagged mcl_3dl at answers.ros.org
Package Summary
| Tags | No category tags. |
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn't implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information. - Purple spheres: sampled points used in the likelihood-model calculation - Red lines: casted rays in the beam-model calculation - Red boxes: detected collisions in raycasting
A demo without odometry is also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
Messages
Services
Plugins
Recent questions tagged mcl_3dl at answers.ros.org
Package Summary
| Tags | No category tags. |
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn't implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information. - Purple spheres: sampled points used in the likelihood-model calculation - Red lines: casted rays in the beam-model calculation - Red boxes: detected collisions in raycasting
A demo without odometry is also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file
Messages
Services
Plugins
Recent questions tagged mcl_3dl at answers.ros.org
Package Summary
| Tags | No category tags. |
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/mcl_3dl.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
mcl_3dl
![]()
![]()
Package summary
mcl_3dl is a ROS node to perform a probabilistic 3-D/6-DOF localization system for mobile robots with 3-D LIDAR(s). It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map.
The node receives the reference pointcloud as an environment map and localizes 6-DOF (x, y, z, yaw, pitch, roll) pose of measured pointclouds assisted by a motion prediction using odometry.
Currently, the supported motion model is differential-wheeled-robot. The node provides classic MCL; currently, it doesn't implement adaptive feature like KDL-sampling and etc.
Algorithms
A fundamental algorithm of mcl_3dl node is Monte Carlo localization (MCL), aka particle filter localization. MCL represents a probabilistic distribution of estimated pose as density and weight of particles and estimates the pose from the distribution.
Node I/O
Install
from source
Note: mcl_3dl_msgs package is required to build mcl_3dl package.
# clone
cd /path/to/your/catkin_ws/src
git clone https://github.com/at-wat/mcl_3dl.git
git clone https://github.com/at-wat/mcl_3dl_msgs.git
# build
cd /path/to/your/catkin_ws
rosdep install --from-paths src --ignore-src -y # Install dependencies
catkin_make -DCMAKE_BUILD_TYPE=Release # Release build is recommended
from apt repository (for ROS Indigo/Kinetic/Lunar on Ubuntu)
sudo apt-get install ros-${ROS_DISTRO}-mcl-3dl
Running the demo
The example bag file of 2+4-DOF tracked vehicle with two Hokuyo YVT-X002 3-D LIDAR is available online. Pre-processed (filtered) 3-D pointcloud, IMU pose, odometry, and map data are packed in the bag.
# Download the example bag (230M)
wget -P ~/Downloads https://openspur.org/~atsushi.w/dataset/mcl_3dl/short_test.bag
# Running the demo
roslaunch mcl_3dl test.launch use_pointcloud_map:=false use_cad_map:=false \
use_bag_file:=true bag_file:=${HOME}/Downloads/short_test.bag
The map data in the bag was generated by using the cartographer_ros and filtered by using pcl_outlier_removal and pcl_voxel_grid utilities.
MarkerArray shows several mcl_3dl internal information. - Purple spheres: sampled points used in the likelihood-model calculation - Red lines: casted rays in the beam-model calculation - Red boxes: detected collisions in raycasting
A demo without odometry is also available.
Contributing
mcl_3dl package is developed under GitHub flow. Feel free to open new Issue and/or Pull Request.
The code in this repository is following ROS C++ Style Guide. A configuration file for clang-format is available at https://github.com/seqsense/ros_style/.
License
- mcl_3dl is provided under the BSD license.
- Backport codes of Point Cloud Library (PCL) is provided under the BSD license.
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Dependant Packages
Launch files
- launch/test.launch
-
- without_odom [default: false]
- config_file [default: $(find mcl_3dl)/config/test_localization.yaml]
- config_file [default: $(find mcl_3dl)/config/test_localization_noodom.yaml]
- use_neonavigation [default: false]
- use_pointcloud_map [default: true]
- use_cad_map [default: false]
- use_cad_map [default: true]
- map_objs
- map_pcd
- map_scale [default: 1.0]
- map_offset_x [default: 0.0]
- map_offset_y [default: 0.0]
- generate_test_bag [default: false]
- use_bag_file [default: false]
- bag_file