
Repository Summary
| Checkout URI | https://github.com/beltransen/velo2cam_gazebo.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-01-31 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
Packages
| Name | Version |
|---|---|
| velodyne_gazebo_plugin | 1.0.0 |
| velo2cam_gazebo | 1.0.0 |
README
velo2cam_gazebo 
Repository including Gazebo models, plugins and worlds to test algorithms for extrinsic calibration of lidar-camera pairs. Package developed at Intelligent Systems Laboratory, Universidad Carlos III de Madrid.
Supported sensors
- Bumblebee XB3 Camera
- Velodyne VLP-16
- Velodyne HDL-32
- Velodyne HDL-64
Gazebo models (need to be moved to ~/.gazebo/models/) so that they can be inserted in Gazebo worlds
This repository includes several sensors and calibration target models to evaluate the performance of extrinsic calibration of lidar-camera pair in the Gazebo Simulator.
Note: The models included in this repository were designed for evaluating the LIDAR-camera calibration algorithm described in [1], whose code is provided here.
Sensors:
- Bumblebee XB3 Camera (Left - center only)
- Velodyne VLP-16 (Based on DataspeedInc)
- Velodyne HDL-32 (Based on DataspeedInc)
- Velodyne HDL-64 (Since 3D meshes are not available, those of HDL-32 model are used instead)
Calibration targets:
- Calibration pattern with wood (maple) texture
- Calibration pattern with chessboard texture
- Chessboard planes for recreating worlds required to test the KIT Calibration Toolbox
Gazebo plugins (compilation of the pkg installs the lib in the proper directory)
- Velodyne plugin providing PointCloud2 with same structure as driver (x, y, z, intensity, ring) and simulated Gaussian noise. (Code from DataspeedInc, although minor patch for vertical resolution issue is included)
Known Issues
- Gazebo can take up to 30 seconds to load the VLP-16 pluggin, 60 seconds for the HDL-32E, and much more HDL-64E
- Gazebo cannot maintain 10Hz with large pointclouds
- Solution: User can reduce number of points in urdf
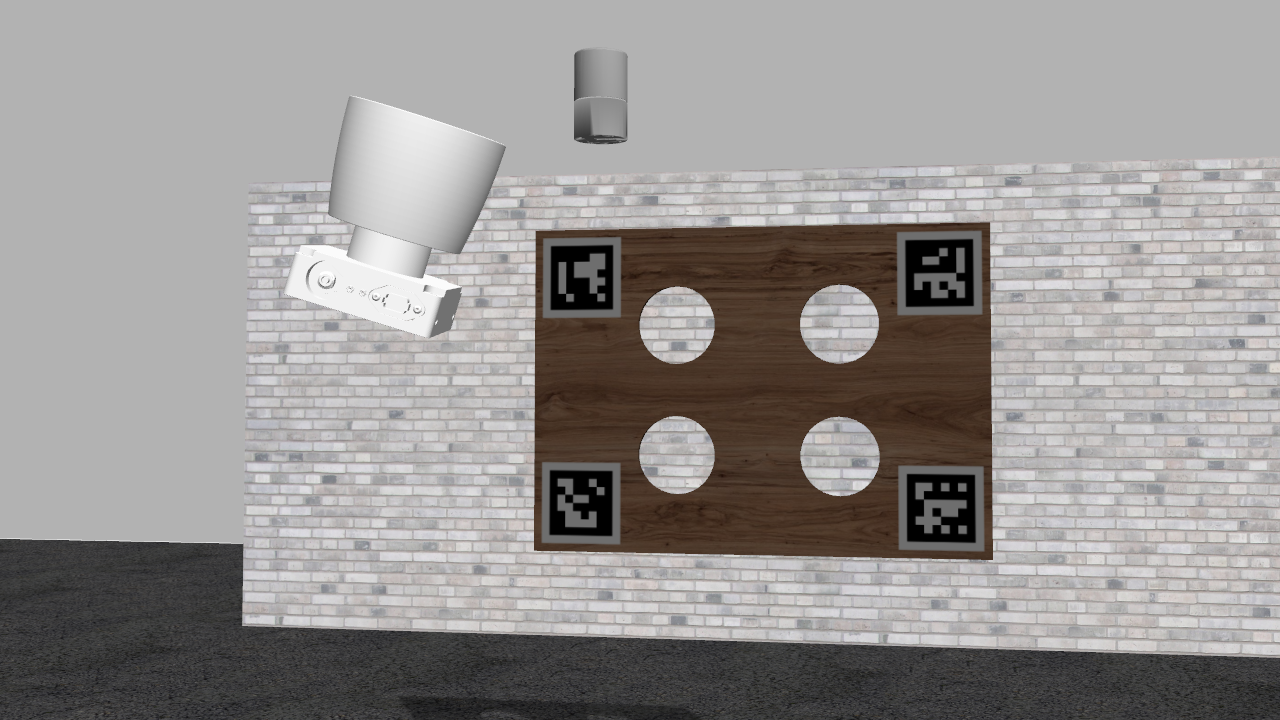
Example Gazebo Calibration Scenario
roslaunch velo2cam_gazebo real_stereoVLP16_trans.launch
Citation
[1] Guindel, C., Beltrán, J., Martín, D. and García, F. (2017). Automatic Extrinsic Calibration for Lidar-Stereo Vehicle Sensor Setups. IEEE International Conference on Intelligent Transportation Systems (ITSC), 674–679.
Pre-print available here.
Repository Summary
| Checkout URI | https://github.com/beltransen/velo2cam_gazebo.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-01-31 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
Packages
| Name | Version |
|---|---|
| velodyne_gazebo_plugin | 1.0.0 |
| velo2cam_gazebo | 1.0.0 |
README
velo2cam_gazebo
Repository including Gazebo models, plugins and worlds to test algorithms for extrinsic calibration of lidar-camera pairs. Package developed at Intelligent Systems Laboratory, Universidad Carlos III de Madrid.
Supported sensors
- Bumblebee XB3 Camera
- Velodyne VLP-16
- Velodyne HDL-32
- Velodyne HDL-64
Gazebo models (need to be moved to ~/.gazebo/models/) so that they can be inserted in Gazebo worlds
This repository includes several sensors and calibration target models to evaluate the performance of extrinsic calibration of lidar-camera pair in the Gazebo Simulator.
Note: The models included in this repository were designed for evaluating the LIDAR-camera calibration algorithm described in [1], whose code is provided here.
Sensors:
- Bumblebee XB3 Camera (Left - center only)
- Velodyne VLP-16 (Based on DataspeedInc)
- Velodyne HDL-32 (Based on DataspeedInc)
- Velodyne HDL-64 (Since 3D meshes are not available, those of HDL-32 model are used instead)
Calibration targets:
- Calibration pattern with wood (maple) texture
- Calibration pattern with chessboard texture
- Chessboard planes for recreating worlds required to test the KIT Calibration Toolbox
Gazebo plugins (compilation of the pkg installs the lib in the proper directory)
- Velodyne plugin providing PointCloud2 with same structure as driver (x, y, z, intensity, ring) and simulated Gaussian noise. (Code from DataspeedInc, although minor patch for vertical resolution issue is included)
Known Issues
- Gazebo can take up to 30 seconds to load the VLP-16 pluggin, 60 seconds for the HDL-32E, and much more HDL-64E
- Gazebo cannot maintain 10Hz with large pointclouds
- Solution: User can reduce number of points in urdf
Example Gazebo Calibration Scenario
roslaunch velo2cam_gazebo real_stereoVLP16_trans.launch
Citation
[1] Guindel, C., Beltrán, J., Martín, D. and García, F. (2017). Automatic Extrinsic Calibration for Lidar-Stereo Vehicle Sensor Setups. IEEE International Conference on Intelligent Transportation Systems (ITSC), 674–679.
Pre-print available here.