
|
urg_stamped package from urg_stamped repourg_stamped |
Package Summary
| Tags | No category tags. |
| Version | 0.0.2 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/seqsense/urg_stamped.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
urg_stamped
Precisely and accurately stamped URG driver for ROS
Backgrounds and Algorithms
2D-LIDAR URG series provides 1ms resolution timestamp and exclusive clock synchronization mode. It was hard to compensate clock drift during measurement using them. Also, the resolution of the timestamp was not enough for a high-speed motion of the sensor.
urg_stamped estimates sub-millisecond timestamp with clock drift compensation. The estimation is structured by following threefold: - Observe sensor internal timestamp by using sensor state command that sometimes responds immediately. - Observe data packet arrival time that is correlated to the true measurement time. - Fuse accurate but low-resolution timestamp and noisy but high-resolution arrival time by the complementary filter.
Usages
Topics and major parameters are designed to be compatible with urg_node.
Published Topics
- scan (sensor_msgs::LaserScan)
Parameters
urg_node compatible parameters
- ip_address (string): device IP address
- ip_port (int): device TCP/IP port
- frame_id (string): frame_id of published scans
- publish_intensity (bool): fill intensity field if true
urg_stamped specific parameters
- sync_interval_min (double): minimum interval to try observing sensor internal timestamp in seconds
- sync_interval_max (double): maximum interval to try observing sensor internal timestamp in seconds
- delay_estim_interval (double): communication delay estimation interval in seconds (dropping 2 or 3 scans during delay estimation)
Known Limitations
- Timestamp estimation is designed for sensors connected by ethernet interface.
- Tested only for UTM-30LX-EW and UST-20LX at now.
- Some scans are dropped due to the clock synchronization and delay estimation.
Comparison with urg_node
Configurations
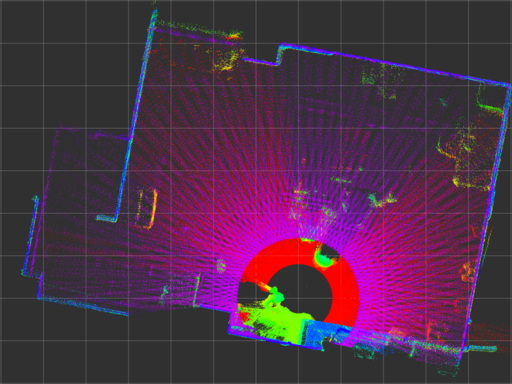
Three UTM-30LX-EWs are mounted on a velocity controlled turntable, as shown below, to reconstruct 3-D point cloud from 2-D scans. The accuracy of the timestamp affects offset and precision of the timestamp affects the distribution of the pointcloud.

Results
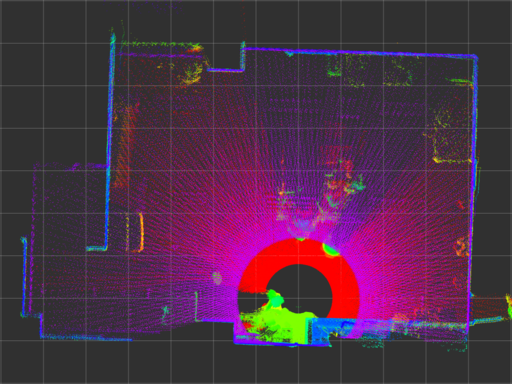
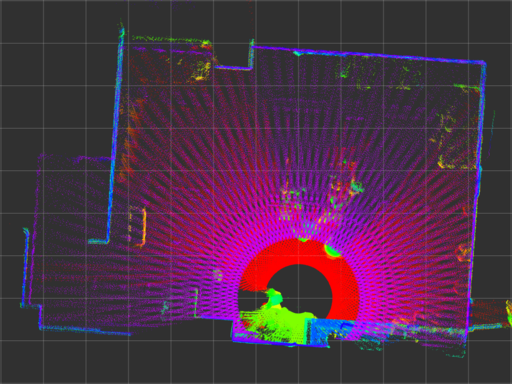
The image below shows point cloud with 1 rad/s of the turntable which can be assumed as a reference. (decay time of the point cloud: 10 seconds)
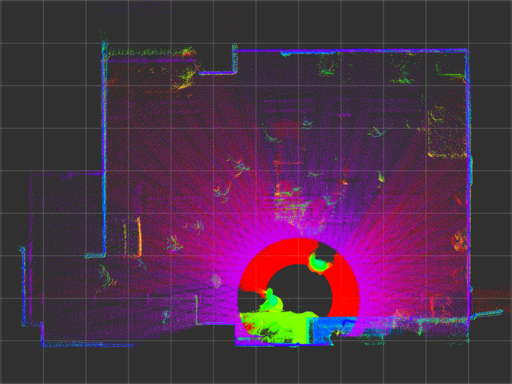
urg_node has large error even if calibrate_time and synchronize_time options are enabled (captioned as urg_node (sync)). urg_stamped has better timestamp characteristics comparing with urg_node.
| 10 rad/s | 20 rad/s | |
|---|---|---|
| urg_stamped | 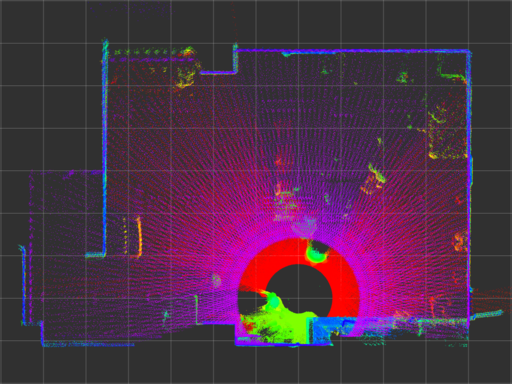 |
 |
| urg_node | 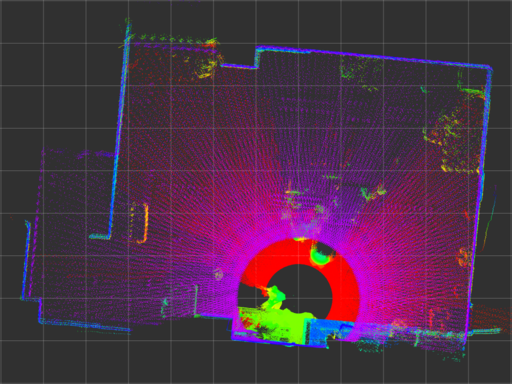 |
 |
| urg_node (sync) |
 |
 |
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Launch files
Messages
Services
Plugins
Recent questions tagged urg_stamped at answers.ros.org
|
|
urg_stamped package from urg_stamped repourg_stamped |
Package Summary
| Tags | No category tags. |
| Version | 0.0.2 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/seqsense/urg_stamped.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
urg_stamped
Precisely and accurately stamped URG driver for ROS
Backgrounds and Algorithms
2D-LIDAR URG series provides 1ms resolution timestamp and exclusive clock synchronization mode. It was hard to compensate clock drift during measurement using them. Also, the resolution of the timestamp was not enough for a high-speed motion of the sensor.
urg_stamped estimates sub-millisecond timestamp with clock drift compensation. The estimation is structured by following threefold: - Observe sensor internal timestamp by using sensor state command that sometimes responds immediately. - Observe data packet arrival time that is correlated to the true measurement time. - Fuse accurate but low-resolution timestamp and noisy but high-resolution arrival time by the complementary filter.
Usages
Topics and major parameters are designed to be compatible with urg_node.
Published Topics
- scan (sensor_msgs::LaserScan)
Parameters
urg_node compatible parameters
- ip_address (string): device IP address
- ip_port (int): device TCP/IP port
- frame_id (string): frame_id of published scans
- publish_intensity (bool): fill intensity field if true
urg_stamped specific parameters
- sync_interval_min (double): minimum interval to try observing sensor internal timestamp in seconds
- sync_interval_max (double): maximum interval to try observing sensor internal timestamp in seconds
- delay_estim_interval (double): communication delay estimation interval in seconds (dropping 2 or 3 scans during delay estimation)
Known Limitations
- Timestamp estimation is designed for sensors connected by ethernet interface.
- Tested only for UTM-30LX-EW and UST-20LX at now.
- Some scans are dropped due to the clock synchronization and delay estimation.
Comparison with urg_node
Configurations
Three UTM-30LX-EWs are mounted on a velocity controlled turntable, as shown below, to reconstruct 3-D point cloud from 2-D scans. The accuracy of the timestamp affects offset and precision of the timestamp affects the distribution of the pointcloud.
Results
The image below shows point cloud with 1 rad/s of the turntable which can be assumed as a reference. (decay time of the point cloud: 10 seconds)
urg_node has large error even if calibrate_time and synchronize_time options are enabled (captioned as urg_node (sync)). urg_stamped has better timestamp characteristics comparing with urg_node.
| 10 rad/s | 20 rad/s | |
|---|---|---|
| urg_stamped | |
|
| urg_node | |
|
| urg_node (sync) |
|
|
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Launch files
Messages
Services
Plugins
Recent questions tagged urg_stamped at answers.ros.org
|
|
urg_stamped package from urg_stamped repourg_stamped |
Package Summary
| Tags | No category tags. |
| Version | 0.0.2 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/seqsense/urg_stamped.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
urg_stamped
Precisely and accurately stamped URG driver for ROS
Backgrounds and Algorithms
2D-LIDAR URG series provides 1ms resolution timestamp and exclusive clock synchronization mode. It was hard to compensate clock drift during measurement using them. Also, the resolution of the timestamp was not enough for a high-speed motion of the sensor.
urg_stamped estimates sub-millisecond timestamp with clock drift compensation. The estimation is structured by following threefold: - Observe sensor internal timestamp by using sensor state command that sometimes responds immediately. - Observe data packet arrival time that is correlated to the true measurement time. - Fuse accurate but low-resolution timestamp and noisy but high-resolution arrival time by the complementary filter.
Usages
Topics and major parameters are designed to be compatible with urg_node.
Published Topics
- scan (sensor_msgs::LaserScan)
Parameters
urg_node compatible parameters
- ip_address (string): device IP address
- ip_port (int): device TCP/IP port
- frame_id (string): frame_id of published scans
- publish_intensity (bool): fill intensity field if true
urg_stamped specific parameters
- sync_interval_min (double): minimum interval to try observing sensor internal timestamp in seconds
- sync_interval_max (double): maximum interval to try observing sensor internal timestamp in seconds
- delay_estim_interval (double): communication delay estimation interval in seconds (dropping 2 or 3 scans during delay estimation)
Known Limitations
- Timestamp estimation is designed for sensors connected by ethernet interface.
- Tested only for UTM-30LX-EW and UST-20LX at now.
- Some scans are dropped due to the clock synchronization and delay estimation.
Comparison with urg_node
Configurations
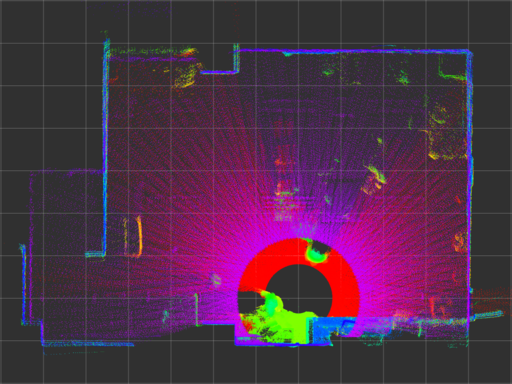
Three UTM-30LX-EWs are mounted on a velocity controlled turntable, as shown below, to reconstruct 3-D point cloud from 2-D scans. The accuracy of the timestamp affects offset and precision of the timestamp affects the distribution of the pointcloud.
Results
The image below shows point cloud with 1 rad/s of the turntable which can be assumed as a reference. (decay time of the point cloud: 10 seconds)
urg_node has large error even if calibrate_time and synchronize_time options are enabled (captioned as urg_node (sync)). urg_stamped has better timestamp characteristics comparing with urg_node.
| 10 rad/s | 20 rad/s | |
|---|---|---|
| urg_stamped | |
|
| urg_node | |
|
| urg_node (sync) |
|
|
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Launch files
Messages
Services
Plugins
Recent questions tagged urg_stamped at answers.ros.org
|
|
urg_stamped package from urg_stamped repourg_stamped |
Package Summary
| Tags | No category tags. |
| Version | 0.0.2 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/seqsense/urg_stamped.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
urg_stamped
Precisely and accurately stamped URG driver for ROS
Backgrounds and Algorithms
2D-LIDAR URG series provides 1ms resolution timestamp and exclusive clock synchronization mode. It was hard to compensate clock drift during measurement using them. Also, the resolution of the timestamp was not enough for a high-speed motion of the sensor.
urg_stamped estimates sub-millisecond timestamp with clock drift compensation. The estimation is structured by following threefold: - Observe sensor internal timestamp by using sensor state command that sometimes responds immediately. - Observe data packet arrival time that is correlated to the true measurement time. - Fuse accurate but low-resolution timestamp and noisy but high-resolution arrival time by the complementary filter.
Usages
Topics and major parameters are designed to be compatible with urg_node.
Published Topics
- scan (sensor_msgs::LaserScan)
Parameters
urg_node compatible parameters
- ip_address (string): device IP address
- ip_port (int): device TCP/IP port
- frame_id (string): frame_id of published scans
- publish_intensity (bool): fill intensity field if true
urg_stamped specific parameters
- sync_interval_min (double): minimum interval to try observing sensor internal timestamp in seconds
- sync_interval_max (double): maximum interval to try observing sensor internal timestamp in seconds
- delay_estim_interval (double): communication delay estimation interval in seconds (dropping 2 or 3 scans during delay estimation)
Known Limitations
- Timestamp estimation is designed for sensors connected by ethernet interface.
- Tested only for UTM-30LX-EW and UST-20LX at now.
- Some scans are dropped due to the clock synchronization and delay estimation.
Comparison with urg_node
Configurations
Three UTM-30LX-EWs are mounted on a velocity controlled turntable, as shown below, to reconstruct 3-D point cloud from 2-D scans. The accuracy of the timestamp affects offset and precision of the timestamp affects the distribution of the pointcloud.
Results
The image below shows point cloud with 1 rad/s of the turntable which can be assumed as a reference. (decay time of the point cloud: 10 seconds)
urg_node has large error even if calibrate_time and synchronize_time options are enabled (captioned as urg_node (sync)). urg_stamped has better timestamp characteristics comparing with urg_node.
| 10 rad/s | 20 rad/s | |
|---|---|---|
| urg_stamped | |
|
| urg_node | |
|
| urg_node (sync) |
|
|
Could not convert RST to MD: No such file or directory - pandoc