
|
backward_ros package from backward_ros repobackward_ros |
Package Summary
| Tags | No category tags. |
| Version | 0.1.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | 0.1.7 |
| Last Updated | 2019-01-11 |
| Dev Status | UNMAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Victor López
Authors
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(catkin REQUIRED COMPONENTS your_dependencies backward_ros)
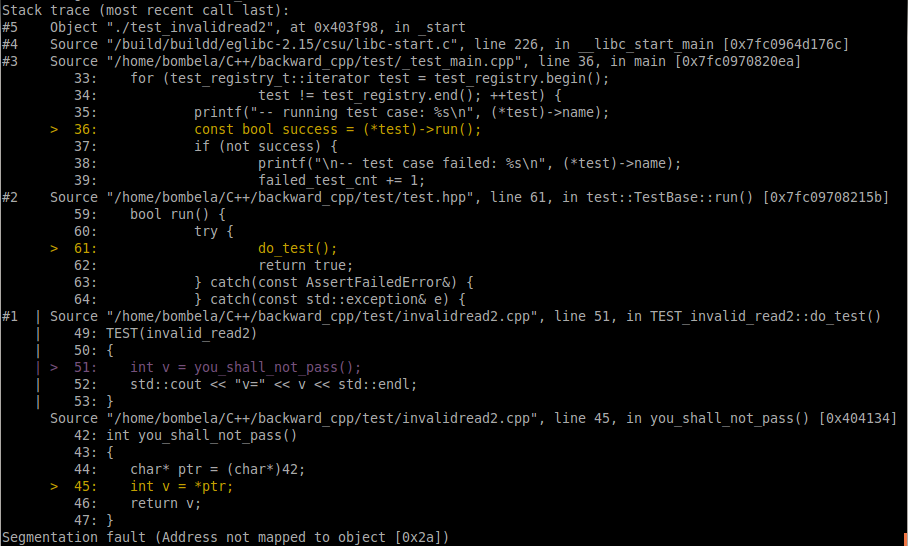
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
You're done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
Could not convert RST to MD: No such file or directory - pandoc
Wiki Tutorials
Source Tutorials
Launch files
Messages
Services
Plugins
Recent questions tagged backward_ros at answers.ros.org
|
|
backward_ros package from backward_ros repobackward_ros |
Package Summary
| Tags | No category tags. |
| Version | 0.1.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | 0.1.7 |
| Last Updated | 2019-01-11 |
| Dev Status | UNMAINTAINED |
| Released | RELEASED |
Package Description
Additional Links
Maintainers
- Victor López
Authors
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(catkin REQUIRED COMPONENTS your_dependencies backward_ros)
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
You're done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
Could not convert RST to MD: No such file or directory - pandoc